This week, I took a break by combining the Good Friday and Qingming Festival holidays.
During this week-long break, I stepped away from experiments and coding. I treated it as a “Recharge Sprint,” similar to what we did back when I worked at Autodesk, a week to put down regular tasks and challenge yourself with something new.
I set a few personal challenges for myself.
Control Theory
The more I work with real robots, the more I realize the importance of control theory. The most impressive moment for me was seeing how tuning up the (“damping”) of a PID controller could diminish the oscillation while teleoperating the Franka Research 3.
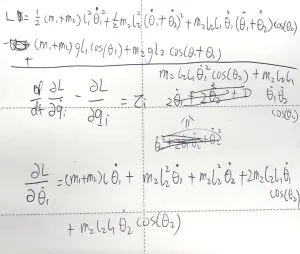
So, this week, I dived deep into the first half of the Underactuated Robotics Lecture 1. Using pen and paper to derive the Euler-Lagrange equation felt terrific.
Remark
Experience from the LeRobot team
Another article I spent a lot of time digesting this week is Unfolding Robotics: Open-Source Shirt Folding from Data to Deployment - a Hugging Face Space by lerobot. As Poor Charlie’s Almanack: The Wit and Wisdom of Charles T. Munger advocates, learning from someone else’s failure is often more important than studying their success.
I am so glad I could read these tremendous lessons learned from the LeRobot team just before I start co-training my VLA model.
MoveIt2
To be honest, it’s a bit embarrassing, but before I even started using MoveIt2 in ROS2 as a “user”, I had already contributed a PR as a “developer”: Fix findWayPointIndicesForDurationAfterStart(), back when I was working on frankz and using MoveIt 2 as a great reference. This week, I finally shifted into that user role and spent some time exploring its fundamental features directly in ROS2.
I believe MoveIt 2 will help me a lot in my future academic journey.