Final Project
As we get closer to the end of the semester for the ISDN3000E C++ and ROS2 undergraduate course, students need to hand in their final project. My supervisor came up with an interesting idea: how about letting a robot play tic-tac-toe using pick and place manipulation?
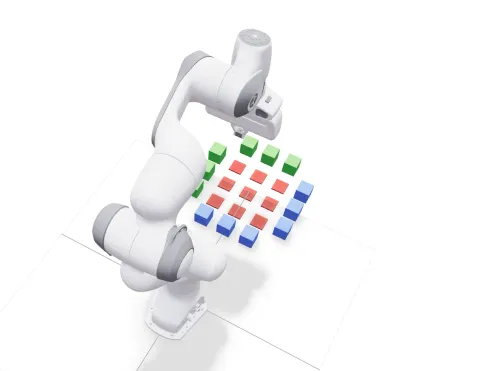
The students are given the poses of all the cubes and grid cells relative to the robot’s base frame. The green cubes represent the O and the blue cubes represent the X. They need to use inverse kinematics to find the joint positions and send the trajectory back to me via a ROS service call.
This is the first time I have built a ROS workspace completely from scratch. The skeleton of this repository is inspired by Yadunund Vijay, who designed the codebase for the AI for Industry Challenge.
RemarkYou can try it out at here.
Calibration
Even though I learned a lot setting up the final project, I have had very little time to spend on my own research.💔
Just like last week, I have to acknowledge how amazing pixi is. This week, I managed to use the pixi-build-ros feature to build up the IFL-CAMP/easy_handeye: Automated, hardware-independent Hand-Eye Calibration. Simply put, this preview feature automatically finds all the required dependencies by itself! That is huge!
This means I can completely avoid building a docker image or Dev Container for the MoveIt calibration tool. It will speed up my calibration process so much. I definitely need to test it again this week because I… changed my hardware setup in order to share a robot with others. Oops.💔