What an intensive week! Balancing my TA duties for a class and working on my project at the same time is sooooooo exhausting.
Teaching is Not Easy🫨
Although I’ve led a few lab sessions this semester, this week’s was extremely tough. It was the first lab introducing ROS2. Before the students can even learn ROS2, they have to understand docker and Dev Container, because running ROS2 natively on Windows and macOS is a nightmare…
Maybe this is just how robotics project works…
noVNC
To make everyone could happily run ROS2 in the exact same environment across Windows and macOS, I found out that the combination of docker, Dev Container, and noVNC is the best option. I initially tried using pixi, but handling the display and GUI forwarding is a little tricky, especially for macOS users.
Calibration
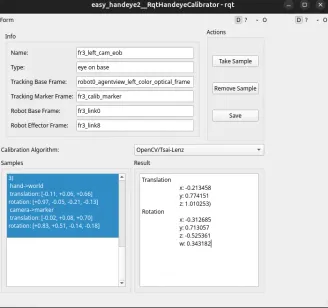
Even though pixi wasn’t the right fit for the lecture environment preparation, it helped me out a lot on my own project this week. I used the preview feature pixi-build-ros to successfully build IFL-CAMP/easy_handeye: Automated, hardware-independent Hand-Eye Calibration! It only took me one day to set up the calibration framework and finish the eye-on-base calibration.

Just like I believe uv is going to be a huge success ( later on acquired by OpenAI). I have no doubt that pixi will become an outstanding standard tool. Once I survive these hectic few weeks, I plan to make a tutorial showing exactly how to set it up.
Cross Embodiment
Since I need to co-train real robot data with the simulation dataset(RoboCasa), I took a detailed look at the data schema of RoboCasa365. It is quite interesting that the state space doesn’t contain the joint positions as proprioception.
Instead, there is a file called embodiment.json. It turns out this is specifically tailored for the 📄GR00T N1: An Open Foundation Model for Generalist Humanoid Robots architecture. This is a deliberate design choice to enable cross-embodiment capabilities using operational space control.
A Silly Wish
Sometimes I realize how lucky it is to be able to spend your time entirely on your own research. It feels awesome. I just wish I had more time to dedicate to my project right now :-)